|
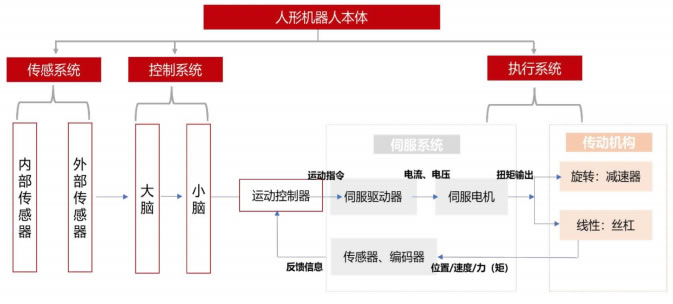
从总体来说,人形机器人由传感系统、控制系统和执行系统三大系统构成:
传感系统。传感系统是由一系列传感器构成,对应于人体的
“五官”,帮助获取人形机器人内外部的状态信息。人形机器人使用
的传感器包括内部传感器和外部传感器,内部传感器主要包括位置传
感器、速度传感器、惯性传感器等,用来检测、提供本体状态信息,
如各关节的位置、速度、加速度等,从而为运动控制提供信息支撑;
外部传感器主要有视觉传感器、触觉传感器等,用来感知机器人所处
的工作环境或工作状况信息,使机器人的动作适应外界情况的变化,
达到更G层次的自动化。
控制系统。相当于机器人的“大脑”和“小脑”,是机器人
的指挥中枢。“大脑”负责环境感知、行为控制、人机交互,通过深
度学习和 AI 技术,并充分利用大模型,实现自主学习、认知和智能
决策。“小脑”则负责运动控制包括运动规划、姿态控制、动态平衡
等,通过实时感知机器人的状态和环境信息,小脑可以调整机器人的动作,使其能够稳定地行走、跑步、跳跃等。控制系统负责处理作业
指令信息、内外环境信息,并依据预定的本体模型、环境模型和控制
程序做出决策,产生相应的控制信号,通过驱动器驱动执行机构的各
个关节按所需的顺序、确定的轨迹运动,完成特定的作业。
执行系统。对应人体的躯干和四肢,负责执行控制系统制定的操作,主要由伺服系统和执行机构组成。“机器肢”指仿人机械臂、
灵巧手、腿足等,“机器体”指骨骼、本体结构等。伺服系统是能根
据指令信号准确地控制执行部件的运动速度与位置的驱动系统,一般
伺服系统由核心零部件电机、驱动器和传感器/编码器组成;传动机
构是把动力从机器的一部分传递到另一部分,典型机构有减速器、丝
杠、蜗轮蜗杆传动杆等。
|
